Abstract
In the mathematical description of dynamic atomic force microscopy (AFM), the relation between the tip–surface normal interaction force, the measurement observables, and the probe excitation parameters is defined by an average of the normal force along the sampling path over the oscillation cycle. Usually, it is tacitly assumed that tip oscillation and force data recording follows the same path perpendicular to the surface. Experimentally, however, the sampling path representing the tip oscillating trajectory is often inclined with respect to the surface normal and the data recording path. Here, we extend the mathematical description of dynamic AFM to include the case of an inclined sampling path. We find that the inclination of the tip movement can have critical consequences for data interpretation, especially for measurements on nanostructured surfaces exhibiting significant lateral force components. Inclination effects are illustrated by simulation results that resemble the representative experimental conditions of measuring a heterogeneous atomic surface. We propose to measure the AFM observables along a path parallel to the oscillation direction in order to reliably recover the force along this direction.
Introduction
Atomic force microscopy (AFM) is a quantitative technique that allows for probing the force field above a surface in one, two, or three dimensions. While imaging in a plane parallel to the surface provides nanoscale and atomic structural information [1], force curves, usually acquired along a recording path perpendicular to the surface, provide quantitative information about the details of the tip–surface interaction when properly analysed [2]. Recently, a universal description of quantitative dynamic force microscopy based on the harmonic approximation has been developed [3], yielding three central equations that link the physical interaction parameters force ![[Graphic 1]](/bjnano/content/inline/2190-4286-13-53-i42.svg?max-width=637&scale=1.18182) and damping
and damping ![[Graphic 2]](/bjnano/content/inline/2190-4286-13-53-i43.svg?max-width=637&scale=1.18182) with the measurement observables static deflection qs, oscillation amplitude A, and phase φ as well as the excitation parameters frequency fexc and force Fexc. This theory specifically predicts the distant-dependent frequency shift of a tip moved perpendicular to a surface for a given force curve. Inversion formulae are available that allow for the extraction of the interaction force from measured frequency-shift data [4,5].
with the measurement observables static deflection qs, oscillation amplitude A, and phase φ as well as the excitation parameters frequency fexc and force Fexc. This theory specifically predicts the distant-dependent frequency shift of a tip moved perpendicular to a surface for a given force curve. Inversion formulae are available that allow for the extraction of the interaction force from measured frequency-shift data [4,5].
A tacit assumption of all prevalent algorithms for force inversion is that the axis of data acquisition (herein denoted as the recording path, usually the axis of the piezo scanner, zp) is parallel to the axis of the oscillation (herein denoted as the sampling path). However, in a typical experimental setup this is not the case. Instead, angles of 10° to 20° between these two directions are often present for technical reasons. Consequences of this inclined AFM cantilever mount have been identified before, in particular for atomic force microscopy performed in static (“contact”) mode where an effective spring constant [6-8] has been introduced and a torque [9,10] as well as load [11] correction has been applied. Additionally, a tilted cantilever has been found to lead to a modification of the tip–sample convolution [12], to enhance the sensitivity of the measurement to the probe side [13], and to influence results of multifrequency AFM and Kelvin probe force microscopy [14]. In the presence of a viscous damping layer, in-plane dissipation mechanisms have been found to cause systematic changes of the phase shift in amplitude-modulation AFM depending on the cantilever inclination [15]. Furthermore, it has been proposed to use the presence of a lateral component in the tip oscillation path for the investigation of in-plane material properties, such as the in-plane shear modulus [16]. Last, the influence of the inclination between oscillation direction and surface plane has been used in lateral force microscopy to determine the probe oscillation amplitude [17].
Here, we extend the established mathematical description for dynamic atomic force microscopy [3] by including free orientations of the tip sampling and data recording paths. The resulting formulae are discussed and implications for precise force measurements [2] are identified and quantified. Most importantly, the data acquisition with an inclined tip sampling path requires modifications of the experimental procedures and data analysis protocols for force measurements to avoid systematic errors in the interpretation of force curve and imaging data.
Results and Discussion
Sensor positioning, sensor displacement, and tip position
Prerequisite to quantitative force microscopy is a precise definition of the involved probe and sample coordinates as well as probe dynamical parameters that are outlined in the following.
In dynamic AFM, the force ![[Graphic 3]](/bjnano/content/inline/2190-4286-13-53-i44.svg?max-width=637&scale=1.18182) acting between a sharp tip and the surface under investigation is measured as a function of the tip position
acting between a sharp tip and the surface under investigation is measured as a function of the tip position ![[Graphic 4]](/bjnano/content/inline/2190-4286-13-53-i45.svg?max-width=637&scale=1.18182) that is usually described in Cartesian coordinates with the origin placed in the sample surface and the z-axis with unit vector
that is usually described in Cartesian coordinates with the origin placed in the sample surface and the z-axis with unit vector ![[Graphic 5]](/bjnano/content/inline/2190-4286-13-53-i46.svg?max-width=637&scale=1.18182) oriented perpendicular to the surface as shown in Figure 1. Lateral movements of the tip as applied for imaging are associated with the x and y axes, while the tip–surface distance zts is measured along the z-axis. In most AFM implementations, the force measurement is restricted to nominally measuring the normal component of the tip–sample force
oriented perpendicular to the surface as shown in Figure 1. Lateral movements of the tip as applied for imaging are associated with the x and y axes, while the tip–surface distance zts is measured along the z-axis. In most AFM implementations, the force measurement is restricted to nominally measuring the normal component of the tip–sample force ![[Graphic 6]](/bjnano/content/inline/2190-4286-13-53-i47.svg?max-width=637&scale=1.18182) often denoted by FN. The ideal force curve is a measurement of
often denoted by FN. The ideal force curve is a measurement of ![[Graphic 7]](/bjnano/content/inline/2190-4286-13-53-i48.svg?max-width=637&scale=1.18182) while the measurement of
while the measurement of ![[Graphic 8]](/bjnano/content/inline/2190-4286-13-53-i49.svg?max-width=637&scale=1.18182) is referred to as force mapping.
is referred to as force mapping.
![[2190-4286-13-53-1]](/bjnano/content/figures/2190-4286-13-53-1.png?scale=2.0&max-width=1024&background=FFFFFF)
Figure 1: Coordinates describing the one-dimensional tip positioning and movement. See main text for description.
Figure 1: Coordinates describing the one-dimensional tip positioning and movement. See main text for descript...
To measure the tip–surface force in a dynamic measurement, the force probe acts as a high-Q oscillator and elastically responds to ![[Graphic 9]](/bjnano/content/inline/2190-4286-13-53-i50.svg?max-width=637&scale=1.18182) by static and dynamic displacement described by
by static and dynamic displacement described by ![[Graphic 10]](/bjnano/content/inline/2190-4286-13-53-i51.svg?max-width=637&scale=1.18182) with
with ![[Graphic 11]](/bjnano/content/inline/2190-4286-13-53-i52.svg?max-width=637&scale=1.18182) being the unit vector along the tip sampling path. This path is usually straight and assumed to be strictly parallel to
being the unit vector along the tip sampling path. This path is usually straight and assumed to be strictly parallel to ![[Graphic 12]](/bjnano/content/inline/2190-4286-13-53-i53.svg?max-width=637&scale=1.18182) Furthermore, we assume an infinitely stiff sensor in directions perpendicular to
Furthermore, we assume an infinitely stiff sensor in directions perpendicular to ![[Graphic 13]](/bjnano/content/inline/2190-4286-13-53-i54.svg?max-width=637&scale=1.18182) as well as a linear sensor response along
as well as a linear sensor response along ![[Graphic 14]](/bjnano/content/inline/2190-4286-13-53-i55.svg?max-width=637&scale=1.18182) Then, the static probe response follows Hooke’s law
Then, the static probe response follows Hooke’s law ![[Graphic 15]](/bjnano/content/inline/2190-4286-13-53-i56.svg?max-width=637&scale=1.18182) with k being the static sensor force constant [18]. In dynamic mode operation, the sensor is excited to periodic displacement q(t) = q(t + 1/fexc) along the q-axis at an excitation frequency fexc.
with k being the static sensor force constant [18]. In dynamic mode operation, the sensor is excited to periodic displacement q(t) = q(t + 1/fexc) along the q-axis at an excitation frequency fexc.
To bring the tip in the desired range of interaction with the surface and to perform the movements required for imaging, force mapping, and taking force curves, the sensor is moved by coarse and fine positioning elements acting at least along the z-axis. To accomplish this, the sensor is attached to a piezo element allowing for fine positioning that, in turn, is attached to a coarse positioning system. The respective sensor positioning movements, the sensor oscillation, and its response to the mean tip–surface force are illustrated in the sketches of Figure 1 for the case of parallel tip sampling and data recording paths.
Initially, the sensor assembly is moved towards the surface by the coarse positioning system so that the relaxed piezo rests at position zcrs and the tip at its starting position z0 (Figure 1a). In its relaxed state, the z piezo and the force sensor have a length of ![[Graphic 16]](/bjnano/content/inline/2190-4286-13-53-i57.svg?max-width=637&scale=1.18182) and
and ![[Graphic 17]](/bjnano/content/inline/2190-4286-13-53-i58.svg?max-width=637&scale=1.18182) respectively. Applying a voltage to the z-piezo results in an extension of the piezo length lp that is described as a piezo position zp on the separate axis zp with unit vector
respectively. Applying a voltage to the z-piezo results in an extension of the piezo length lp that is described as a piezo position zp on the separate axis zp with unit vector ![[Graphic 18]](/bjnano/content/inline/2190-4286-13-53-i59.svg?max-width=637&scale=1.18182) and with the origin chosen to coincide with the zcrs position (Figure 1b). As the unit vectors
and with the origin chosen to coincide with the zcrs position (Figure 1b). As the unit vectors ![[Graphic 19]](/bjnano/content/inline/2190-4286-13-53-i60.svg?max-width=637&scale=1.18182) and
and ![[Graphic 20]](/bjnano/content/inline/2190-4286-13-53-i61.svg?max-width=637&scale=1.18182) are chosen to point into the same direction, a piezo extension zp < 0 results in an approach of the tip towards the surface while zp > 0 indicates a tip retraction. Coarse and fine approach define the sensor position zsen = z0 + zp, which is at this point identical to the tip position (tip–sample distance) zts as the force Fts acting on the tip is unmeasurably small for sufficiently large zts. Upon further approach of the sensor, however, the tip experiences a measureable force, yielding a static sensor displacement qs described on the q-axis with the origin chosen at zsen, corresponding to the tip centre position zc = zsen + qs (Figure 1c). As
are chosen to point into the same direction, a piezo extension zp < 0 results in an approach of the tip towards the surface while zp > 0 indicates a tip retraction. Coarse and fine approach define the sensor position zsen = z0 + zp, which is at this point identical to the tip position (tip–sample distance) zts as the force Fts acting on the tip is unmeasurably small for sufficiently large zts. Upon further approach of the sensor, however, the tip experiences a measureable force, yielding a static sensor displacement qs described on the q-axis with the origin chosen at zsen, corresponding to the tip centre position zc = zsen + qs (Figure 1c). As ![[Graphic 21]](/bjnano/content/inline/2190-4286-13-53-i62.svg?max-width=637&scale=1.18182) and
and ![[Graphic 22]](/bjnano/content/inline/2190-4286-13-53-i63.svg?max-width=637&scale=1.18182) point in the same direction, a sensor displacement q < 0 corresponds to a tip movement towards the surface. Note that the tip centre position zc cannot easily be set or determined as the static sensor displacement is governed by the a priori unknown force curve. Furthermore, qs is usually so small that it is at or beyond the limit of detectability for most NC-AFM implementations. In dynamic NC-AFM operation, the sensor oscillates with an amplitude A symmetrical to the static displacement qs with turning points qs + A and qs − A (Figure 1d). The momentary tip position at time t can either be described as the displacement q(t) or as the position zts(t), whereby the lower turning point
point in the same direction, a sensor displacement q < 0 corresponds to a tip movement towards the surface. Note that the tip centre position zc cannot easily be set or determined as the static sensor displacement is governed by the a priori unknown force curve. Furthermore, qs is usually so small that it is at or beyond the limit of detectability for most NC-AFM implementations. In dynamic NC-AFM operation, the sensor oscillates with an amplitude A symmetrical to the static displacement qs with turning points qs + A and qs − A (Figure 1d). The momentary tip position at time t can either be described as the displacement q(t) or as the position zts(t), whereby the lower turning point ![[Graphic 23]](/bjnano/content/inline/2190-4286-13-53-i64.svg?max-width=637&scale=1.18182) is the point of strongest tip–surface interaction.
is the point of strongest tip–surface interaction.
While the tip position and sensor dynamics can principally be well described by the respective positions on the z-axis, this axis is practically of limited use as its zero point cannot be defined or determined in a reasonable way. This is due to the fact that neither zcrs nor ![[Graphic 24]](/bjnano/content/inline/2190-4286-13-53-i65.svg?max-width=637&scale=1.18182) can be determined with atomic-scale precision, which would be needed for properly taking into account the force curve
can be determined with atomic-scale precision, which would be needed for properly taking into account the force curve ![[Graphic 25]](/bjnano/content/inline/2190-4286-13-53-i66.svg?max-width=637&scale=1.18182) Furthermore, it is conceptually difficult to define the position of the surface at the atomic scale. As every force curve acquired on a surface diverges for zts → 0, the natural choice of the z-axis origin would be the z value approached by the diverging force. This point is, however, experimentally not accessible. Instead, precise values for the piezo position zp and the sensor displacement q(t) are experimentally available. To derive a force–distance curve experimentally, the usual procedure is therefore to apply dynamic AFM and to measure the distance-dependent shift in frequency, Δf(zp), of the sensor excitation frequency fexc that results when phase resonance for the sensor oscillation is maintained throughout the measurement [19]. The resulting curve Δf(zp) is a convolution of the covered part of the force curve
Furthermore, it is conceptually difficult to define the position of the surface at the atomic scale. As every force curve acquired on a surface diverges for zts → 0, the natural choice of the z-axis origin would be the z value approached by the diverging force. This point is, however, experimentally not accessible. Instead, precise values for the piezo position zp and the sensor displacement q(t) are experimentally available. To derive a force–distance curve experimentally, the usual procedure is therefore to apply dynamic AFM and to measure the distance-dependent shift in frequency, Δf(zp), of the sensor excitation frequency fexc that results when phase resonance for the sensor oscillation is maintained throughout the measurement [19]. The resulting curve Δf(zp) is a convolution of the covered part of the force curve ![[Graphic 26]](/bjnano/content/inline/2190-4286-13-53-i67.svg?max-width=637&scale=1.18182) and a kernel depending on the stabilised sensor oscillation amplitude A. A sophisticated analysis of the Δf(zp) curves measured with different oscillation amplitudes A yields a precise result [2] for the force curve, yet with an arbitrary origin along the z-axis. In theoretical modelling and analysis of tip–sample interactions, it has been established as a standard to represent force curves as
and a kernel depending on the stabilised sensor oscillation amplitude A. A sophisticated analysis of the Δf(zp) curves measured with different oscillation amplitudes A yields a precise result [2] for the force curve, yet with an arbitrary origin along the z-axis. In theoretical modelling and analysis of tip–sample interactions, it has been established as a standard to represent force curves as ![[Graphic 27]](/bjnano/content/inline/2190-4286-13-53-i68.svg?max-width=637&scale=1.18182) [4,5]. As
[4,5]. As ![[Graphic 28]](/bjnano/content/inline/2190-4286-13-53-i69.svg?max-width=637&scale=1.18182) is practically not accessible, for the representation of force curves we introduce an axis ztip that is identical to the z-axis except for an unknown offset δz0 for the tip starting position and describe a force curve resulting from the analysis of measured data as
is practically not accessible, for the representation of force curves we introduce an axis ztip that is identical to the z-axis except for an unknown offset δz0 for the tip starting position and describe a force curve resulting from the analysis of measured data as ![[Graphic 29]](/bjnano/content/inline/2190-4286-13-53-i70.svg?max-width=637&scale=1.18182) where
where ![[Graphic 30]](/bjnano/content/inline/2190-4286-13-53-i71.svg?max-width=637&scale=1.18182)
Geometry for the inclined sampling path
A tip sampling path inclined relative to the z-axis implies that the direction of oscillation ![[Graphic 31]](/bjnano/content/inline/2190-4286-13-53-i72.svg?max-width=637&scale=1.18182) is tilted with respect to
is tilted with respect to ![[Graphic 32]](/bjnano/content/inline/2190-4286-13-53-i73.svg?max-width=637&scale=1.18182) as illustrated in Figure 2. We introduce the inclined axis w parallel to the tip sampling path with
as illustrated in Figure 2. We introduce the inclined axis w parallel to the tip sampling path with ![[Graphic 33]](/bjnano/content/inline/2190-4286-13-53-i74.svg?max-width=637&scale=1.18182) pointing in the direction of
pointing in the direction of ![[Graphic 34]](/bjnano/content/inline/2190-4286-13-53-i75.svg?max-width=637&scale=1.18182) Assuming an inclination angle of α (with 0 ≤ α ≤ π/2) between
Assuming an inclination angle of α (with 0 ≤ α ≤ π/2) between ![[Graphic 35]](/bjnano/content/inline/2190-4286-13-53-i76.svg?max-width=637&scale=1.18182) and
and ![[Graphic 36]](/bjnano/content/inline/2190-4286-13-53-i77.svg?max-width=637&scale=1.18182) any position on the w-axis can be expressed by the respective position on the ztip-axis by a simple geometrical transformation. This implies that any sensor movement along zp is not in line with the tip sampling path. Therefore, one has to take into account that the inclined oscillatory motion of the sensor can invoke significant lateral movement of the tip when describing the Δf signal formation and force deconvolution. If the force field
any position on the w-axis can be expressed by the respective position on the ztip-axis by a simple geometrical transformation. This implies that any sensor movement along zp is not in line with the tip sampling path. Therefore, one has to take into account that the inclined oscillatory motion of the sensor can invoke significant lateral movement of the tip when describing the Δf signal formation and force deconvolution. If the force field ![[Graphic 37]](/bjnano/content/inline/2190-4286-13-53-i78.svg?max-width=637&scale=1.18182) above the surface is homogeneous and isotropic with respect to the lateral coordinates xts and yts, the inclined axis of sensor oscillation can be taken into account by using transformed position variables zp → zp cosα or ztip → ztip cosα.
above the surface is homogeneous and isotropic with respect to the lateral coordinates xts and yts, the inclined axis of sensor oscillation can be taken into account by using transformed position variables zp → zp cosα or ztip → ztip cosα.
![[2190-4286-13-53-2]](/bjnano/content/figures/2190-4286-13-53-2.png?scale=2.0&max-width=1024&background=FFFFFF)
Figure 2:
Coordinate system for considering an inclined oscillation by introducing the vector ![[Graphic 38]](/bjnano/content/inline/2190-4286-13-53-i79.svg?max-width=637&scale=1.18182) and the axis w.
and the axis w.
Figure 2:
Coordinate system for considering an inclined oscillation by introducing the vector and the axis w....
If no such homogeneity is present, however, the w-axis has to be taken explicitly into account. The definition of a zero position of this w-axis goes along the same lines as the definition of zero δz0 for the ztip-axis by introducing ![[Graphic 39]](/bjnano/content/inline/2190-4286-13-53-i80.svg?max-width=637&scale=1.18182) and the uncertainty δw0.
and the uncertainty δw0.
For the further discussion, we define the vectorial sensor displacement ![[Graphic 40]](/bjnano/content/inline/2190-4286-13-53-i81.svg?max-width=637&scale=1.18182) as
as
![[2190-4286-13-53-i1]](/bjnano/content/inline/2190-4286-13-53-i1.svg?max-width=590&scale=1.18182)
Within the harmonic approximation [3], q(t) is given as
![[2190-4286-13-53-i2]](/bjnano/content/inline/2190-4286-13-53-i2.svg?max-width=590&scale=1.18182)
with the static deflection qs, the oscillation amplitude A, the excitation frequency fexc, and the phase φ [3]. In its vectorial form, the momentary position of the tip ![[Graphic 41]](/bjnano/content/inline/2190-4286-13-53-i82.svg?max-width=637&scale=1.18182) is given as
is given as
![[2190-4286-13-53-i3]](/bjnano/content/inline/2190-4286-13-53-i3.svg?max-width=590&scale=1.18182)
![[2190-4286-13-53-i4]](/bjnano/content/inline/2190-4286-13-53-i4.svg?max-width=590&scale=1.18182)
with the centre position ![[Graphic 42]](/bjnano/content/inline/2190-4286-13-53-i83.svg?max-width=637&scale=1.18182) start position
start position ![[Graphic 43]](/bjnano/content/inline/2190-4286-13-53-i84.svg?max-width=637&scale=1.18182) and piezo position
and piezo position ![[Graphic 44]](/bjnano/content/inline/2190-4286-13-53-i85.svg?max-width=637&scale=1.18182) These quantities generalise the previously introduced z coordinates zc, z0, and zp, respectively. We further introduce the reduced amplitude Az as the projection of A on the surface normal [2]
These quantities generalise the previously introduced z coordinates zc, z0, and zp, respectively. We further introduce the reduced amplitude Az as the projection of A on the surface normal [2]
![[2190-4286-13-53-i5]](/bjnano/content/inline/2190-4286-13-53-i5.svg?max-width=590&scale=1.18182)
Equation of motion for the inclined sampling path
Next, we derive the three AFM equations [3] linking the AFM physical parameters with the experimental observables and excitation parameters for a straight tip sampling path with arbitrary oscillation direction. The starting point is the differential equation describing the displacement q(t) in presence of the tip–sample force field ![[Graphic 45]](/bjnano/content/inline/2190-4286-13-53-i86.svg?max-width=637&scale=1.18182) and excitation force
and excitation force ![[Graphic 128]](/bjnano/content/inline/2190-4286-13-53-i169.svg?max-width=637&scale=1.18182) as follows
as follows
![[2190-4286-13-53-i6]](/bjnano/content/inline/2190-4286-13-53-i6.svg?max-width=590&scale=1.18182)
with the sensor parameters fundamental eigenfrequency f0, modal sensor stiffness k0 [18], and modal sensor quality factor Q0. This equation of motion is a one-dimensional differential equation depending on the tip–sample force component ![[Graphic 46]](/bjnano/content/inline/2190-4286-13-53-i87.svg?max-width=637&scale=1.18182) following the description in [3,15,16]. The vectorial tip–sample force can generally be expressed by the sum of an even,
following the description in [3,15,16]. The vectorial tip–sample force can generally be expressed by the sum of an even, ![[Graphic 47]](/bjnano/content/inline/2190-4286-13-53-i88.svg?max-width=637&scale=1.18182) and an odd,
and an odd, ![[Graphic 48]](/bjnano/content/inline/2190-4286-13-53-i89.svg?max-width=637&scale=1.18182) component
component
![[2190-4286-13-53-i7]](/bjnano/content/inline/2190-4286-13-53-i7.svg?max-width=590&scale=1.18182)
The deflection q is periodic with Texc = ![[Graphic 49]](/bjnano/content/inline/2190-4286-13-53-i90.svg?max-width=637&scale=1.18182) and the tip–sample force component
and the tip–sample force component ![[Graphic 50]](/bjnano/content/inline/2190-4286-13-53-i91.svg?max-width=637&scale=1.18182) can, therefore, be expressed by the Fourier sum
can, therefore, be expressed by the Fourier sum
![[2190-4286-13-53-i8]](/bjnano/content/inline/2190-4286-13-53-i8.svg?max-width=590&scale=1.18182)
with the coefficient for n = 0
![[2190-4286-13-53-i9]](/bjnano/content/inline/2190-4286-13-53-i9.svg?max-width=590&scale=1.18182)
and the coefficients for n ≥ 1
![[2190-4286-13-53-i10]](/bjnano/content/inline/2190-4286-13-53-i10.svg?max-width=590&scale=1.18182)
![[2190-4286-13-53-i11]](/bjnano/content/inline/2190-4286-13-53-i11.svg?max-width=590&scale=1.18182)
With the time average defined by [3]
![[2190-4286-13-53-i12]](/bjnano/content/inline/2190-4286-13-53-i12.svg?max-width=590&scale=1.18182)
for an arbitrary function ![[Graphic 51]](/bjnano/content/inline/2190-4286-13-53-i92.svg?max-width=637&scale=1.18182) with projection
with projection ![[Graphic 52]](/bjnano/content/inline/2190-4286-13-53-i93.svg?max-width=637&scale=1.18182) the Fourier coefficients for n ≥ 1 can be expressed in terms of time averages
the Fourier coefficients for n ≥ 1 can be expressed in terms of time averages
![[2190-4286-13-53-i13]](/bjnano/content/inline/2190-4286-13-53-i13.svg?max-width=590&scale=1.18182)
![[2190-4286-13-53-i14]](/bjnano/content/inline/2190-4286-13-53-i14.svg?max-width=590&scale=1.18182)
![[2190-4286-13-53-i15]](/bjnano/content/inline/2190-4286-13-53-i15.svg?max-width=590&scale=1.18182)
AFM equations for the inclined sampling path
The three AFM equations follow from evaluating the Fourier coefficients ![[Graphic 53]](/bjnano/content/inline/2190-4286-13-53-i94.svg?max-width=637&scale=1.18182)
![[Graphic 54]](/bjnano/content/inline/2190-4286-13-53-i95.svg?max-width=637&scale=1.18182) and
and ![[Graphic 55]](/bjnano/content/inline/2190-4286-13-53-i96.svg?max-width=637&scale=1.18182) The first step is to calculate the time-averaged form of the three equations (see Appendix section for the derivations)
The first step is to calculate the time-averaged form of the three equations (see Appendix section for the derivations)
![[2190-4286-13-53-i16]](/bjnano/content/inline/2190-4286-13-53-i16.svg?max-width=590&scale=1.18182)
![[2190-4286-13-53-i17]](/bjnano/content/inline/2190-4286-13-53-i17.svg?max-width=590&scale=1.18182)
![[2190-4286-13-53-i18]](/bjnano/content/inline/2190-4286-13-53-i18.svg?max-width=590&scale=1.18182)
In a next step, the time averages are transformed to spatial averages similar to the formerly introduced cup and cap average functionals [3].
The harmonic approximation constrains the tip movement within the ![[Graphic 56]](/bjnano/content/inline/2190-4286-13-53-i97.svg?max-width=637&scale=1.18182) phase space to a closed trajectory. Consequently, the parametrisation with a spatial coordinate along this sampling path requires a parametrisation of the velocity by this coordinate as well. To reflect this dependency, we introduce the even force
phase space to a closed trajectory. Consequently, the parametrisation with a spatial coordinate along this sampling path requires a parametrisation of the velocity by this coordinate as well. To reflect this dependency, we introduce the even force ![[Graphic 57]](/bjnano/content/inline/2190-4286-13-53-i98.svg?max-width=637&scale=1.18182) formally defined by
formally defined by ![[Graphic 58]](/bjnano/content/inline/2190-4286-13-53-i99.svg?max-width=637&scale=1.18182) as the force along the tip sampling path. Then, we further define the projection of an arbitrary function
as the force along the tip sampling path. Then, we further define the projection of an arbitrary function ![[Graphic 59]](/bjnano/content/inline/2190-4286-13-53-i100.svg?max-width=637&scale=1.18182) along the tip sampling path on the oscillation direction
along the tip sampling path on the oscillation direction ![[Graphic 60]](/bjnano/content/inline/2190-4286-13-53-i101.svg?max-width=637&scale=1.18182) as
as ![[Graphic 61]](/bjnano/content/inline/2190-4286-13-53-i102.svg?max-width=637&scale=1.18182) and perform the integration along the sampling path symmetrically to the centre position
and perform the integration along the sampling path symmetrically to the centre position ![[Graphic 62]](/bjnano/content/inline/2190-4286-13-53-i103.svg?max-width=637&scale=1.18182) of this projected quantity
of this projected quantity ![[Graphic 63]](/bjnano/content/inline/2190-4286-13-53-i104.svg?max-width=637&scale=1.18182) The cup and cap averaging functionals are then written as
The cup and cap averaging functionals are then written as
![[2190-4286-13-53-i19]](/bjnano/content/inline/2190-4286-13-53-i19.svg?max-width=590&scale=1.18182)
![[2190-4286-13-53-i20]](/bjnano/content/inline/2190-4286-13-53-i20.svg?max-width=590&scale=1.18182)
These averages have now the structure of line integrals along the tip sampling path parallel to ![[Graphic 64]](/bjnano/content/inline/2190-4286-13-53-i105.svg?max-width=637&scale=1.18182) spanning the range −A to A as parameterised by q′.
spanning the range −A to A as parameterised by q′.
We furthermore define the tip–sample force gradient along the oscillation path, ![[Graphic 65]](/bjnano/content/inline/2190-4286-13-53-i106.svg?max-width=637&scale=1.18182) by the derivation of the force along the oscillation direction, namely
by the derivation of the force along the oscillation direction, namely
![[2190-4286-13-53-i21]](/bjnano/content/inline/2190-4286-13-53-i21.svg?max-width=590&scale=1.18182)
The three AFM equations follow now from Equation 16, Equation 17, and Equation 18 as
![[2190-4286-13-53-i22]](/bjnano/content/inline/2190-4286-13-53-i22.svg?max-width=590&scale=1.18182)
![[2190-4286-13-53-i23]](/bjnano/content/inline/2190-4286-13-53-i23.svg?max-width=590&scale=1.18182)
![[2190-4286-13-53-i24]](/bjnano/content/inline/2190-4286-13-53-i24.svg?max-width=590&scale=1.18182)
whereby the vectorial damping coefficient ![[Graphic 66]](/bjnano/content/inline/2190-4286-13-53-i107.svg?max-width=637&scale=1.18182) and the damping coefficient
and the damping coefficient ![[Graphic 67]](/bjnano/content/inline/2190-4286-13-53-i108.svg?max-width=637&scale=1.18182) along the oscillation path have been introduced to write the odd force as
along the oscillation path have been introduced to write the odd force as
![[2190-4286-13-53-i25]](/bjnano/content/inline/2190-4286-13-53-i25.svg?max-width=590&scale=1.18182)
Force response for the inclined sampling path
By reinterpreting the cup and cap averaging functionals as line integrals along the inclined tip sampling path, three AFM equations were found that represent the general case for a probe oscillating in an arbitrary direction. A probe orientation different from the surface normal and its oscillation in the vector force field above the surface has important consequences on the measured force response and appropriate data analysis procedures.
We demonstrate these consequences by simulating the frequency shift Δf = fexc − f0 in the frequency-modulated AFM mode for different cases using a Morse potential
![[2190-4286-13-53-i26]](/bjnano/content/inline/2190-4286-13-53-i26.svg?max-width=590&scale=1.18182)
as a model that describes the interaction between two atoms at a distance d by the parameters Eb = 0.371 aJ, σ0 = 0.235 nm, and κ = 4.25 nm−1 (adapted from [20]). We use this model for the pairwise interaction between a tip with a heterogeneous surface section. The surface section is built by arranging Na = 5 atoms at zts = 0 nm along the x-axis (with unit vector ![[Graphic 68]](/bjnano/content/inline/2190-4286-13-53-i109.svg?max-width=637&scale=1.18182) ) at an atom–atom distance of da = 0.5 nm. To model a second atomic species for the heterogeneous surface section, Eb of the central atom is scaled by a factor of four. A sixth probe atom at position
) at an atom–atom distance of da = 0.5 nm. To model a second atomic species for the heterogeneous surface section, Eb of the central atom is scaled by a factor of four. A sixth probe atom at position ![[Graphic 69]](/bjnano/content/inline/2190-4286-13-53-i110.svg?max-width=637&scale=1.18182) representing the tip is moved within the force field
representing the tip is moved within the force field ![[Graphic 70]](/bjnano/content/inline/2190-4286-13-53-i111.svg?max-width=637&scale=1.18182) calculated from
calculated from
![[2190-4286-13-53-i27]](/bjnano/content/inline/2190-4286-13-53-i27.svg?max-width=590&scale=1.18182)
Vector ![[Graphic 71]](/bjnano/content/inline/2190-4286-13-53-i112.svg?max-width=637&scale=1.18182) defines the origin of the surface section. In the following, the central atom is placed at
defines the origin of the surface section. In the following, the central atom is placed at ![[Graphic 72]](/bjnano/content/inline/2190-4286-13-53-i113.svg?max-width=637&scale=1.18182) = (xts, yts, zts) = (0.35, 0, 0) nm. The potential VMorse and the force components
= (xts, yts, zts) = (0.35, 0, 0) nm. The potential VMorse and the force components ![[Graphic 73]](/bjnano/content/inline/2190-4286-13-53-i114.svg?max-width=637&scale=1.18182) as well as
as well as ![[Graphic 74]](/bjnano/content/inline/2190-4286-13-53-i115.svg?max-width=637&scale=1.18182) are shown in Figure 3a, b, and c, respectively. A vectorial representation of the force field in the xts–zts plane is included in Figure 3a.
are shown in Figure 3a, b, and c, respectively. A vectorial representation of the force field in the xts–zts plane is included in Figure 3a.
![[2190-4286-13-53-3]](/bjnano/content/figures/2190-4286-13-53-3.png?scale=2.0&max-width=1024&background=FFFFFF)
Figure 3:
(a) Potential, (b) lateral force component, and (c) vertical forces for a pairwise Morse interaction summed over five surface atoms (positions of two atoms indicated by red points in (a), further atoms are located outside of the shown region to model a surface section). The sampling paths along the oscillation (dashed lines) as well as data recording paths (dotted lines) are included for four cases in (b,c). (d) Projection of the interaction force on the ![[Graphic 75]](/bjnano/content/inline/2190-4286-13-53-i116.svg?max-width=637&scale=1.18182) -axis. (e) Δf(
-axis. (e) Δf(![[Graphic 76]](/bjnano/content/inline/2190-4286-13-53-i117.svg?max-width=637&scale=1.18182) ) curves calculated for four different inclination angles and starting points.
) curves calculated for four different inclination angles and starting points.
Figure 3: (a) Potential, (b) lateral force component, and (c) vertical forces for a pairwise Morse interactio...
To illustrate the effects resulting from an inclined tip oscillation, four cases are discussed. Common to all cases is that the data recording path, described by the oscillation centre positions ![[Graphic 77]](/bjnano/content/inline/2190-4286-13-53-i118.svg?max-width=637&scale=1.18182) remains oriented parallel to the
remains oriented parallel to the ![[Graphic 78]](/bjnano/content/inline/2190-4286-13-53-i119.svg?max-width=637&scale=1.18182) -axis, that is, perpendicular to the surface as indicated by the dotted lines in Figure 3b and Figure 3c. This represents the common experimental protocol. In turn, the sampling path describing the tip oscillation is inclined by different angles α within the xts–zts plane with the normalised inclined oscillation vector
-axis, that is, perpendicular to the surface as indicated by the dotted lines in Figure 3b and Figure 3c. This represents the common experimental protocol. In turn, the sampling path describing the tip oscillation is inclined by different angles α within the xts–zts plane with the normalised inclined oscillation vector ![[Graphic 79]](/bjnano/content/inline/2190-4286-13-53-i120.svg?max-width=637&scale=1.18182) = [sinα, 0, cosα]. The tip trajectories during single oscillation cycles at one fixed
= [sinα, 0, cosα]. The tip trajectories during single oscillation cycles at one fixed ![[Graphic 80]](/bjnano/content/inline/2190-4286-13-53-i121.svg?max-width=637&scale=1.18182) are indicated for each case by dashed lines in Figure 3b and Figure 3c.
are indicated for each case by dashed lines in Figure 3b and Figure 3c.
The force component ![[Graphic 81]](/bjnano/content/inline/2190-4286-13-53-i122.svg?max-width=637&scale=1.18182) along the tip path is a scalar quantity and shown for α = 45° in Figure 3d. Compared to the vertical component
along the tip path is a scalar quantity and shown for α = 45° in Figure 3d. Compared to the vertical component ![[Graphic 82]](/bjnano/content/inline/2190-4286-13-53-i123.svg?max-width=637&scale=1.18182) (see Figure 3c), the shape at the atom positions is asymmetric and the absolute contrast is diminished as a result of projecting the vectorial force
(see Figure 3c), the shape at the atom positions is asymmetric and the absolute contrast is diminished as a result of projecting the vectorial force ![[Graphic 83]](/bjnano/content/inline/2190-4286-13-53-i124.svg?max-width=637&scale=1.18182) onto
onto ![[Graphic 84]](/bjnano/content/inline/2190-4286-13-53-i125.svg?max-width=637&scale=1.18182)
The force gradient ![[Graphic 85]](/bjnano/content/inline/2190-4286-13-53-i126.svg?max-width=637&scale=1.18182) along the tip path and projected to
along the tip path and projected to ![[Graphic 86]](/bjnano/content/inline/2190-4286-13-53-i127.svg?max-width=637&scale=1.18182) is calculated by numerical differentiation along
is calculated by numerical differentiation along ![[Graphic 87]](/bjnano/content/inline/2190-4286-13-53-i128.svg?max-width=637&scale=1.18182) of the
of the ![[Graphic 88]](/bjnano/content/inline/2190-4286-13-53-i129.svg?max-width=637&scale=1.18182) force field. The result is used to calculate frequency shift Δf data from Equation 23 for φ = −π/2. As an example, we use parameters for a sensor often used in low-temperature environments (tuning fork sensor [21] with f0 = 30 kHz, k0 = 1800 N/m, and A = 0.45 nm). However, similar effects can be present when using parameters for other sensors as well. Frequency shift Δf data are calculated with the piezo axis located at xts = yts = 0 and moving the tip along zp for data recording, while data are plotted as a function of
force field. The result is used to calculate frequency shift Δf data from Equation 23 for φ = −π/2. As an example, we use parameters for a sensor often used in low-temperature environments (tuning fork sensor [21] with f0 = 30 kHz, k0 = 1800 N/m, and A = 0.45 nm). However, similar effects can be present when using parameters for other sensors as well. Frequency shift Δf data are calculated with the piezo axis located at xts = yts = 0 and moving the tip along zp for data recording, while data are plotted as a function of ![[Graphic 89]](/bjnano/content/inline/2190-4286-13-53-i130.svg?max-width=637&scale=1.18182)
The solid blue curve in Figure 3e represents case (1) of a perpendicular oscillation with ![[Graphic 90]](/bjnano/content/inline/2190-4286-13-53-i131.svg?max-width=637&scale=1.18182) = [0,0,1]. When positioning the tip along the
= [0,0,1]. When positioning the tip along the ![[Graphic 91]](/bjnano/content/inline/2190-4286-13-53-i132.svg?max-width=637&scale=1.18182) -axis for data acquisition, this case allows for a reliable determination of the interaction force
-axis for data acquisition, this case allows for a reliable determination of the interaction force ![[Graphic 92]](/bjnano/content/inline/2190-4286-13-53-i133.svg?max-width=637&scale=1.18182) by applying known inversion strategies [2,4,5].
by applying known inversion strategies [2,4,5].
Next, the tip inclination is set to α = 12.5° within the xts–zts plane as case (2) shown in yellow in Figure 3b and Figure 3c. The corresponding Δf(2)(![[Graphic 93]](/bjnano/content/inline/2190-4286-13-53-i134.svg?max-width=637&scale=1.18182) ) curve (dash-dotted yellow in Figure 3e) is different from the blue Δf(1)(
) curve (dash-dotted yellow in Figure 3e) is different from the blue Δf(1)(![[Graphic 94]](/bjnano/content/inline/2190-4286-13-53-i135.svg?max-width=637&scale=1.18182) ) curve. This is expected as the lower turning point moved sideways and the cap averaging is performed along a different path than in case (1). Note that in contrast to case (1), the tip sampling path has no overlapping segments when moving the tip along zp. In case (3), the lateral movement of the lower turning point is compensated by subtracting the vector
) curve. This is expected as the lower turning point moved sideways and the cap averaging is performed along a different path than in case (1). Note that in contrast to case (1), the tip sampling path has no overlapping segments when moving the tip along zp. In case (3), the lateral movement of the lower turning point is compensated by subtracting the vector ![[Graphic 95]](/bjnano/content/inline/2190-4286-13-53-i136.svg?max-width=637&scale=1.18182) = [Δx, 0, Δz] with Δx = −Asinα and Δz = A(1 − cosα) from
= [Δx, 0, Δz] with Δx = −Asinα and Δz = A(1 − cosα) from ![[Graphic 96]](/bjnano/content/inline/2190-4286-13-53-i137.svg?max-width=637&scale=1.18182) The resulting Δf(3)(
The resulting Δf(3)(![[Graphic 97]](/bjnano/content/inline/2190-4286-13-53-i138.svg?max-width=637&scale=1.18182) ) data included as a dashed red curve in Figure 3e deviates from all other curves.
) data included as a dashed red curve in Figure 3e deviates from all other curves.
When further increasing the inclination angle α as in case (4), the deviation becomes larger as presented by the violet dotted curve in Figure 3e for α = 45°. Last, we note that lateral components are virtually absent for large tip–sample distances in this model, leading to a convergence of the Δf(![[Graphic 98]](/bjnano/content/inline/2190-4286-13-53-i139.svg?max-width=637&scale=1.18182) ) curves in the regime
) curves in the regime ![[Graphic 99]](/bjnano/content/inline/2190-4286-13-53-i140.svg?max-width=637&scale=1.18182) ≫ 1 nm.
≫ 1 nm.
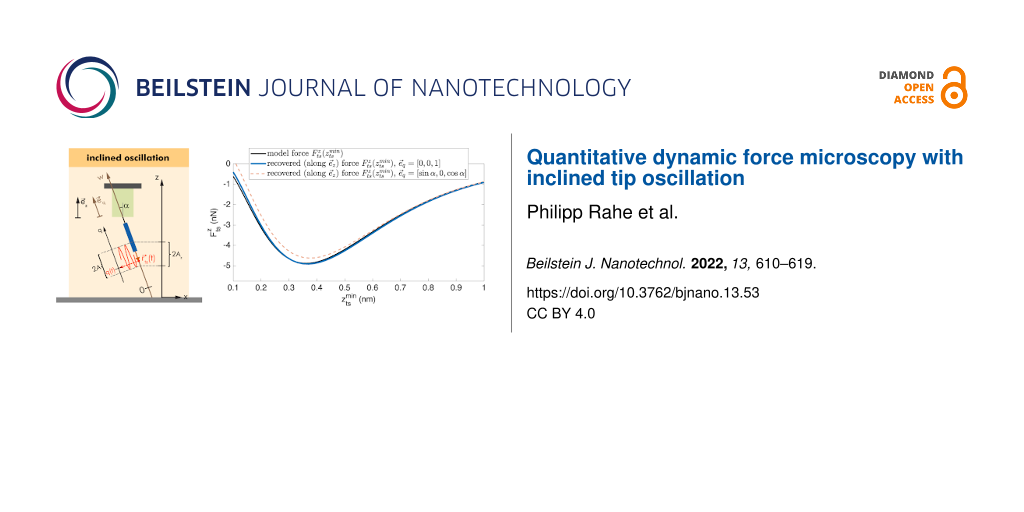
Force deconvolution for the inclined sampling path
The difference in the orientation of ![[Graphic 100]](/bjnano/content/inline/2190-4286-13-53-i141.svg?max-width=637&scale=1.18182) and
and ![[Graphic 101]](/bjnano/content/inline/2190-4286-13-53-i142.svg?max-width=637&scale=1.18182) violates a fundamental assumption of the commonly used inversion algorithms [4,5]: The tip sampling path segments are not overlapping when moving the tip along the data recording path for an inclined oscillation. The resulting error in the force recovery is shown in Figure 4c, where the red dashed curve presents the recovered force for the case of an oscillation inclined by α = 12.5° and Δf data recorded along
violates a fundamental assumption of the commonly used inversion algorithms [4,5]: The tip sampling path segments are not overlapping when moving the tip along the data recording path for an inclined oscillation. The resulting error in the force recovery is shown in Figure 4c, where the red dashed curve presents the recovered force for the case of an oscillation inclined by α = 12.5° and Δf data recorded along ![[Graphic 102]](/bjnano/content/inline/2190-4286-13-53-i143.svg?max-width=637&scale=1.18182) As is apparent, the force curve does not match the model reference curve,
As is apparent, the force curve does not match the model reference curve, ![[Graphic 103]](/bjnano/content/inline/2190-4286-13-53-i144.svg?max-width=637&scale=1.18182) included as the solid black line. In contrast, the force curve recovered for the vertical oscillation and vertical data recording (
included as the solid black line. In contrast, the force curve recovered for the vertical oscillation and vertical data recording (![[Graphic 104]](/bjnano/content/inline/2190-4286-13-53-i145.svg?max-width=637&scale=1.18182) = [0,0,1], blue curve) matches the reference curve.
= [0,0,1], blue curve) matches the reference curve.
![[2190-4286-13-53-4]](/bjnano/content/figures/2190-4286-13-53-4.png?scale=2.0&max-width=1024&background=FFFFFF)
Figure 4:
(a) Heterogeneous surface potential with the tip–sample force vector field indicated by arrows (same as Figure 3a). (b) Vertical force component with the tip sampling path (dashed lines) and data recording path (dotted lines). (c) Tip–sample forces plotted with respect to the vertical coordinate ![[Graphic 105]](/bjnano/content/inline/2190-4286-13-53-i146.svg?max-width=637&scale=1.18182) (d) Tip–sample forces plotted with respect to the parameter
(d) Tip–sample forces plotted with respect to the parameter ![[Graphic 106]](/bjnano/content/inline/2190-4286-13-53-i147.svg?max-width=637&scale=1.18182) along the inclined oscillation direction. Remaining small deviations between the (c) black and blue curves and (d) black and green curves are explained by the approximations present in the Sader–Jarvis algorithm [20].
along the inclined oscillation direction. Remaining small deviations between the (c) black and blue curves and (d) black and green curves are explained by the approximations present in the Sader–Jarvis algorithm [20].
Figure 4: (a) Heterogeneous surface potential with the tip–sample force vector field indicated by arrows (sam...
As a solution to this issue, we propose to orient the recording path for acquiring the AFM observables and parameters parallel to the tip sampling path ![[Graphic 107]](/bjnano/content/inline/2190-4286-13-53-i148.svg?max-width=637&scale=1.18182) describing the tip oscillation. This modification leads to an overlap of the tip sampling path segments for nearby positions along the data recording path. Therefore, the deconvolution using the known algorithms can be performed in the usual manner. Naturally, the result will not represent the perpendicular force
describing the tip oscillation. This modification leads to an overlap of the tip sampling path segments for nearby positions along the data recording path. Therefore, the deconvolution using the known algorithms can be performed in the usual manner. Naturally, the result will not represent the perpendicular force ![[Graphic 108]](/bjnano/content/inline/2190-4286-13-53-i149.svg?max-width=637&scale=1.18182) but rather describes the force component
but rather describes the force component ![[Graphic 109]](/bjnano/content/inline/2190-4286-13-53-i150.svg?max-width=637&scale=1.18182) along the w-axis, parameterised by the scalar variable
along the w-axis, parameterised by the scalar variable ![[Graphic 110]](/bjnano/content/inline/2190-4286-13-53-i151.svg?max-width=637&scale=1.18182) For a conservative force field, the vertical interaction force could in principle be calculated from this result. Additionally, if the full force field is of interest, this can be extracted by systematic measurements of many Δf curves using the appropriate experimental procedures [22].
For a conservative force field, the vertical interaction force could in principle be calculated from this result. Additionally, if the full force field is of interest, this can be extracted by systematic measurements of many Δf curves using the appropriate experimental procedures [22].
Simulation results for moving the tip along the inclined path during data acquisition and extracting the force along this path are presented in Figure 4d by the green curve. The force along this data recording path is correctly recovered as shown in Figure 4d where the green dash-dotted curve closely matches the model curve (in solid black) extracted along this path. Note that the force along an inclined w-axis is different from the vertical interaction force along ![[Graphic 111]](/bjnano/content/inline/2190-4286-13-53-i152.svg?max-width=637&scale=1.18182)
Conclusion
Several conclusions can be drawn from extending the mathematical description of dynamic force microscopy by arbitrary tip sampling and data recording paths. For a typical inclination of α = 12.5°, the minimum force was calculated to differ by more than 5% when compared to a result not taking the inclination into account. The magnitude of this difference depends on the model parameter choice and geometry: The difference can be amplified or reduced depending on the oscillation amplitude, on the interaction potential strength and decay, as well as on the atomic geometry. For example, edges of finite atomic slabs or larger atomic clusters generate significant effects. In practice, a model calculation is required to determine the uncertainty in the measured force due to the inclined tip oscillation.
Precise forces are measured if the data recording path, here introduced as the axis w, is aligned parallel to the tip sampling path, here described as the vector ![[Graphic 112]](/bjnano/content/inline/2190-4286-13-53-i153.svg?max-width=637&scale=1.18182) The resulting measured force represents the component
The resulting measured force represents the component ![[Graphic 113]](/bjnano/content/inline/2190-4286-13-53-i154.svg?max-width=637&scale=1.18182) of the tip–sample force along this direction. Despite the formal and quantitative difference from the commonly considered vertical component
of the tip–sample force along this direction. Despite the formal and quantitative difference from the commonly considered vertical component ![[Graphic 114]](/bjnano/content/inline/2190-4286-13-53-i155.svg?max-width=637&scale=1.18182) the component along w delivers identical physical insights into the tip–sample interaction.
the component along w delivers identical physical insights into the tip–sample interaction.
Appendix: Mathematical Derivations
AFM Equation 1
The first AFM equation follows from evaluating the Fourier coefficient ![[Graphic 115]](/bjnano/content/inline/2190-4286-13-53-i156.svg?max-width=637&scale=1.18182) defined by
defined by
![[2190-4286-13-53-i28]](/bjnano/content/inline/2190-4286-13-53-i28.svg?max-width=590&scale=1.18182)
The tip–sample force can furthermore be written as a sum of an even and an odd force
![[2190-4286-13-53-i29]](/bjnano/content/inline/2190-4286-13-53-i29.svg?max-width=590&scale=1.18182)
By definition of an odd force, the time average ![[Graphic 116]](/bjnano/content/inline/2190-4286-13-53-i157.svg?max-width=637&scale=1.18182) evaluates to zero. We compare this equation by introducing the equation of motion (Equation 6) for
evaluates to zero. We compare this equation by introducing the equation of motion (Equation 6) for ![[Graphic 117]](/bjnano/content/inline/2190-4286-13-53-i158.svg?max-width=637&scale=1.18182) and using the fact that the time average is a linear functional
and using the fact that the time average is a linear functional
![[2190-4286-13-53-i30]](/bjnano/content/inline/2190-4286-13-53-i30.svg?max-width=590&scale=1.18182)
With the harmonic approximation (Equation 2) it can directly be shown that ![[Graphic 118]](/bjnano/content/inline/2190-4286-13-53-i159.svg?max-width=637&scale=1.18182) and qs = ⟨q⟩t. The first AFM equation directly follows as
and qs = ⟨q⟩t. The first AFM equation directly follows as
![[2190-4286-13-53-i31]](/bjnano/content/inline/2190-4286-13-53-i31.svg?max-width=590&scale=1.18182)
AFM Equation 2
The Fourier coefficient ![[Graphic 119]](/bjnano/content/inline/2190-4286-13-53-i160.svg?max-width=637&scale=1.18182) is defined as
is defined as
![[2190-4286-13-53-i32]](/bjnano/content/inline/2190-4286-13-53-i32.svg?max-width=590&scale=1.18182)
Within the harmonic approximation (Equation 2), this term can be written as
![[2190-4286-13-53-i33]](/bjnano/content/inline/2190-4286-13-53-i33.svg?max-width=590&scale=1.18182)
and ![[Graphic 120]](/bjnano/content/inline/2190-4286-13-53-i161.svg?max-width=637&scale=1.18182) be expressed by even and odd forces
be expressed by even and odd forces
![[2190-4286-13-53-i34]](/bjnano/content/inline/2190-4286-13-53-i34.svg?max-width=590&scale=1.18182)
whereby the average ![[Graphic 121]](/bjnano/content/inline/2190-4286-13-53-i162.svg?max-width=637&scale=1.18182) evaluates to zero. Using the equation of motion (Equation 6), the Fourier coefficient can be written as
evaluates to zero. Using the equation of motion (Equation 6), the Fourier coefficient can be written as
![[2190-4286-13-53-i35]](/bjnano/content/inline/2190-4286-13-53-i35.svg?max-width=590&scale=1.18182)
In full analogy to [3], this equation evaluates to
![[2190-4286-13-53-i36]](/bjnano/content/inline/2190-4286-13-53-i36.svg?max-width=590&scale=1.18182)
whereby the identities ![[Graphic 122]](/bjnano/content/inline/2190-4286-13-53-i163.svg?max-width=637&scale=1.18182) are used.
are used.
AFM Equation 3
The Fourier coefficient ![[Graphic 123]](/bjnano/content/inline/2190-4286-13-53-i164.svg?max-width=637&scale=1.18182) is defined as
is defined as
![[2190-4286-13-53-i37]](/bjnano/content/inline/2190-4286-13-53-i37.svg?max-width=590&scale=1.18182)
which can be written as
![[2190-4286-13-53-i38]](/bjnano/content/inline/2190-4286-13-53-i38.svg?max-width=590&scale=1.18182)
by using the harmonic approximation, Equation 2. The force is again expressed as a sum of even and odd contributions
![[2190-4286-13-53-i39]](/bjnano/content/inline/2190-4286-13-53-i39.svg?max-width=590&scale=1.18182)
whereby ![[Graphic 124]](/bjnano/content/inline/2190-4286-13-53-i165.svg?max-width=637&scale=1.18182) evaluates to zero. Using the equation of motion, Equation 6, this is equal to
evaluates to zero. Using the equation of motion, Equation 6, this is equal to
![[2190-4286-13-53-i40]](/bjnano/content/inline/2190-4286-13-53-i40.svg?max-width=590&scale=1.18182)
With the identities ![[Graphic 125]](/bjnano/content/inline/2190-4286-13-53-i166.svg?max-width=637&scale=1.18182) this term evaluates to
this term evaluates to
![[2190-4286-13-53-i41]](/bjnano/content/inline/2190-4286-13-53-i41.svg?max-width=590&scale=1.18182)
![[Graphic 126]](/bjnano/content/inline/2190-4286-13-53-i167.svg?max-width=637&scale=1.18182)
![[Graphic 127]](/bjnano/content/inline/2190-4286-13-53-i168.svg?max-width=637&scale=1.18182)
References
-
Gross, L.; Schuler, B.; Pavliček, N.; Fatayer, S.; Majzik, Z.; Moll, N.; Peña, D.; Meyer, G. Angew. Chem., Int. Ed. 2018, 57, 3888–3908. doi:10.1002/anie.201703509
Return to citation in text: [1] -
Heile, D.; Olbrich, R.; Reichling, M.; Rahe, P. Phys. Rev. B 2021, 103, 075409. doi:10.1103/physrevb.103.075409
Return to citation in text: [1] [2] [3] [4] [5] -
Söngen, H.; Bechstein, R.; Kühnle, A. J. Phys.: Condens. Matter 2017, 29, 274001. doi:10.1088/1361-648x/aa6f8b
Return to citation in text: [1] [2] [3] [4] [5] [6] [7] [8] [9] -
Sader, J. E.; Jarvis, S. P. Appl. Phys. Lett. 2004, 84, 1801–1803. doi:10.1063/1.1667267
Return to citation in text: [1] [2] [3] [4] -
Giessibl, F. J. Appl. Phys. Lett. 2001, 78, 123–125. doi:10.1063/1.1335546
Return to citation in text: [1] [2] [3] [4] -
Heim, L.-O.; Kappl, M.; Butt, H.-J. Langmuir 2004, 20, 2760–2764. doi:10.1021/la036128m
Return to citation in text: [1] -
Hutter, J. L. Langmuir 2005, 21, 2630–2632. doi:10.1021/la047670t
Return to citation in text: [1] -
Gates, R. S. Rev. Sci. Instrum. 2017, 88, 123710. doi:10.1063/1.4986201
Return to citation in text: [1] -
Edwards, S. A.; Ducker, W. A.; Sader, J. E. J. Appl. Phys. 2008, 103, 064513. doi:10.1063/1.2885734
Return to citation in text: [1] -
Wang, F. J. Appl. Phys. 2009, 106, 096103. doi:10.1063/1.3257268
Return to citation in text: [1] -
Cannara, R. J.; Brukman, M. J.; Carpick, R. W. Rev. Sci. Instrum. 2005, 76, 053706. doi:10.1063/1.1896624
Return to citation in text: [1] -
Wang, C.; Sun, J.; Itoh, H.; Shen, D.; Hu, J. Anal. Sci. 2011, 27, 143–147. doi:10.2116/analsci.27.143
Return to citation in text: [1] -
Misaka, T.; Kajimoto, K.; Araki, K.; Otsuka, Y.; Matsumoto, T. Jpn. J. Appl. Phys. 2020, 59, 090906. doi:10.35848/1347-4065/abac6e
Return to citation in text: [1] -
Garrett, J. L.; Krayer, L. J.; Palm, K. J.; Munday, J. N. Appl. Phys. Lett. 2017, 111, 043105. doi:10.1063/1.4996720
Return to citation in text: [1] -
D’Amato, M. J.; Marcus, M. S.; Eriksson, M. A.; Carpick, R. W. Appl. Phys. Lett. 2004, 85, 4738–4740. doi:10.1063/1.1812839
Return to citation in text: [1] [2] -
Marcus, M. S.; Carpick, R. W.; Sasaki, D. Y.; Eriksson, M. A. Phys. Rev. Lett. 2002, 88, 226103. doi:10.1103/physrevlett.88.226103
Return to citation in text: [1] [2] -
Gretz, O.; Weymouth, A. J.; Holzmann, T.; Pürckhauer, K.; Giessibl, F. J. Beilstein J. Nanotechnol. 2021, 12, 517–524. doi:10.3762/bjnano.12.42
Return to citation in text: [1] -
Lübbe, J.; Doering, L.; Reichling, M. Meas. Sci. Technol. 2012, 23, 045401. doi:10.1088/0957-0233/23/4/045401
Return to citation in text: [1] [2] -
Albrecht, T. R.; Grütter, P.; Horne, D.; Rugar, D. J. Appl. Phys. 1991, 69, 668–673. doi:10.1063/1.347347
Return to citation in text: [1] -
Welker, J.; Illek, E.; Giessibl, F. J. Beilstein J. Nanotechnol. 2012, 3, 238–248. doi:10.3762/bjnano.3.27
Return to citation in text: [1] [2] -
Falter, J.; Stiefermann, M.; Langewisch, G.; Schurig, P.; Hölscher, H.; Fuchs, H.; Schirmeisen, A. Beilstein J. Nanotechnol. 2014, 5, 507–516. doi:10.3762/bjnano.5.59
Return to citation in text: [1] -
Rahe, P.; Schütte, J.; Schniederberend, W.; Reichling, M.; Abe, M.; Sugimoto, Y.; Kühnle, A. Rev. Sci. Instrum. 2011, 82, 063704. doi:10.1063/1.3600453
Return to citation in text: [1]
| 20. | Welker, J.; Illek, E.; Giessibl, F. J. Beilstein J. Nanotechnol. 2012, 3, 238–248. doi:10.3762/bjnano.3.27 |
| 21. | Falter, J.; Stiefermann, M.; Langewisch, G.; Schurig, P.; Hölscher, H.; Fuchs, H.; Schirmeisen, A. Beilstein J. Nanotechnol. 2014, 5, 507–516. doi:10.3762/bjnano.5.59 |
| 2. | Heile, D.; Olbrich, R.; Reichling, M.; Rahe, P. Phys. Rev. B 2021, 103, 075409. doi:10.1103/physrevb.103.075409 |
| 4. | Sader, J. E.; Jarvis, S. P. Appl. Phys. Lett. 2004, 84, 1801–1803. doi:10.1063/1.1667267 |
| 5. | Giessibl, F. J. Appl. Phys. Lett. 2001, 78, 123–125. doi:10.1063/1.1335546 |
| 1. | Gross, L.; Schuler, B.; Pavliček, N.; Fatayer, S.; Majzik, Z.; Moll, N.; Peña, D.; Meyer, G. Angew. Chem., Int. Ed. 2018, 57, 3888–3908. doi:10.1002/anie.201703509 |
| 6. | Heim, L.-O.; Kappl, M.; Butt, H.-J. Langmuir 2004, 20, 2760–2764. doi:10.1021/la036128m |
| 7. | Hutter, J. L. Langmuir 2005, 21, 2630–2632. doi:10.1021/la047670t |
| 8. | Gates, R. S. Rev. Sci. Instrum. 2017, 88, 123710. doi:10.1063/1.4986201 |
| 2. | Heile, D.; Olbrich, R.; Reichling, M.; Rahe, P. Phys. Rev. B 2021, 103, 075409. doi:10.1103/physrevb.103.075409 |
| 4. | Sader, J. E.; Jarvis, S. P. Appl. Phys. Lett. 2004, 84, 1801–1803. doi:10.1063/1.1667267 |
| 5. | Giessibl, F. J. Appl. Phys. Lett. 2001, 78, 123–125. doi:10.1063/1.1335546 |
| 18. | Lübbe, J.; Doering, L.; Reichling, M. Meas. Sci. Technol. 2012, 23, 045401. doi:10.1088/0957-0233/23/4/045401 |
| 3. | Söngen, H.; Bechstein, R.; Kühnle, A. J. Phys.: Condens. Matter 2017, 29, 274001. doi:10.1088/1361-648x/aa6f8b |
| 17. | Gretz, O.; Weymouth, A. J.; Holzmann, T.; Pürckhauer, K.; Giessibl, F. J. Beilstein J. Nanotechnol. 2021, 12, 517–524. doi:10.3762/bjnano.12.42 |
| 2. | Heile, D.; Olbrich, R.; Reichling, M.; Rahe, P. Phys. Rev. B 2021, 103, 075409. doi:10.1103/physrevb.103.075409 |
| 3. | Söngen, H.; Bechstein, R.; Kühnle, A. J. Phys.: Condens. Matter 2017, 29, 274001. doi:10.1088/1361-648x/aa6f8b |
| 13. | Misaka, T.; Kajimoto, K.; Araki, K.; Otsuka, Y.; Matsumoto, T. Jpn. J. Appl. Phys. 2020, 59, 090906. doi:10.35848/1347-4065/abac6e |
| 15. | D’Amato, M. J.; Marcus, M. S.; Eriksson, M. A.; Carpick, R. W. Appl. Phys. Lett. 2004, 85, 4738–4740. doi:10.1063/1.1812839 |
| 22. | Rahe, P.; Schütte, J.; Schniederberend, W.; Reichling, M.; Abe, M.; Sugimoto, Y.; Kühnle, A. Rev. Sci. Instrum. 2011, 82, 063704. doi:10.1063/1.3600453 |
| 12. | Wang, C.; Sun, J.; Itoh, H.; Shen, D.; Hu, J. Anal. Sci. 2011, 27, 143–147. doi:10.2116/analsci.27.143 |
| 16. | Marcus, M. S.; Carpick, R. W.; Sasaki, D. Y.; Eriksson, M. A. Phys. Rev. Lett. 2002, 88, 226103. doi:10.1103/physrevlett.88.226103 |
| 3. | Söngen, H.; Bechstein, R.; Kühnle, A. J. Phys.: Condens. Matter 2017, 29, 274001. doi:10.1088/1361-648x/aa6f8b |
| 11. | Cannara, R. J.; Brukman, M. J.; Carpick, R. W. Rev. Sci. Instrum. 2005, 76, 053706. doi:10.1063/1.1896624 |
| 4. | Sader, J. E.; Jarvis, S. P. Appl. Phys. Lett. 2004, 84, 1801–1803. doi:10.1063/1.1667267 |
| 5. | Giessibl, F. J. Appl. Phys. Lett. 2001, 78, 123–125. doi:10.1063/1.1335546 |
| 9. | Edwards, S. A.; Ducker, W. A.; Sader, J. E. J. Appl. Phys. 2008, 103, 064513. doi:10.1063/1.2885734 |
| 10. | Wang, F. J. Appl. Phys. 2009, 106, 096103. doi:10.1063/1.3257268 |
| 14. | Garrett, J. L.; Krayer, L. J.; Palm, K. J.; Munday, J. N. Appl. Phys. Lett. 2017, 111, 043105. doi:10.1063/1.4996720 |
| 20. | Welker, J.; Illek, E.; Giessibl, F. J. Beilstein J. Nanotechnol. 2012, 3, 238–248. doi:10.3762/bjnano.3.27 |
| 4. | Sader, J. E.; Jarvis, S. P. Appl. Phys. Lett. 2004, 84, 1801–1803. doi:10.1063/1.1667267 |
| 5. | Giessibl, F. J. Appl. Phys. Lett. 2001, 78, 123–125. doi:10.1063/1.1335546 |
| 19. | Albrecht, T. R.; Grütter, P.; Horne, D.; Rugar, D. J. Appl. Phys. 1991, 69, 668–673. doi:10.1063/1.347347 |
| 2. | Heile, D.; Olbrich, R.; Reichling, M.; Rahe, P. Phys. Rev. B 2021, 103, 075409. doi:10.1103/physrevb.103.075409 |
| 3. | Söngen, H.; Bechstein, R.; Kühnle, A. J. Phys.: Condens. Matter 2017, 29, 274001. doi:10.1088/1361-648x/aa6f8b |
| 3. | Söngen, H.; Bechstein, R.; Kühnle, A. J. Phys.: Condens. Matter 2017, 29, 274001. doi:10.1088/1361-648x/aa6f8b |
| 18. | Lübbe, J.; Doering, L.; Reichling, M. Meas. Sci. Technol. 2012, 23, 045401. doi:10.1088/0957-0233/23/4/045401 |
| 3. | Söngen, H.; Bechstein, R.; Kühnle, A. J. Phys.: Condens. Matter 2017, 29, 274001. doi:10.1088/1361-648x/aa6f8b |
| 15. | D’Amato, M. J.; Marcus, M. S.; Eriksson, M. A.; Carpick, R. W. Appl. Phys. Lett. 2004, 85, 4738–4740. doi:10.1063/1.1812839 |
| 16. | Marcus, M. S.; Carpick, R. W.; Sasaki, D. Y.; Eriksson, M. A. Phys. Rev. Lett. 2002, 88, 226103. doi:10.1103/physrevlett.88.226103 |
| 2. | Heile, D.; Olbrich, R.; Reichling, M.; Rahe, P. Phys. Rev. B 2021, 103, 075409. doi:10.1103/physrevb.103.075409 |
| 3. | Söngen, H.; Bechstein, R.; Kühnle, A. J. Phys.: Condens. Matter 2017, 29, 274001. doi:10.1088/1361-648x/aa6f8b |
| 3. | Söngen, H.; Bechstein, R.; Kühnle, A. J. Phys.: Condens. Matter 2017, 29, 274001. doi:10.1088/1361-648x/aa6f8b |
| 3. | Söngen, H.; Bechstein, R.; Kühnle, A. J. Phys.: Condens. Matter 2017, 29, 274001. doi:10.1088/1361-648x/aa6f8b |
© 2022 Rahe et al.; licensee Beilstein-Institut.
This is an open access article licensed under the terms of the Beilstein-Institut Open Access License Agreement (https://www.beilstein-journals.org/bjnano/terms), which is identical to the Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0). The reuse of material under this license requires that the author(s), source and license are credited. Third-party material in this article could be subject to other licenses (typically indicated in the credit line), and in this case, users are required to obtain permission from the license holder to reuse the material.